Unfortunately the assembly of the steering wheel had to be rushed. This was in order for it to be finished in time for the formula student event last year. Even though it was not quite complete, we still took and displayed the model. Alongside the other prototypes it attracted a lot of attention and provided topics for discussion with the judges.

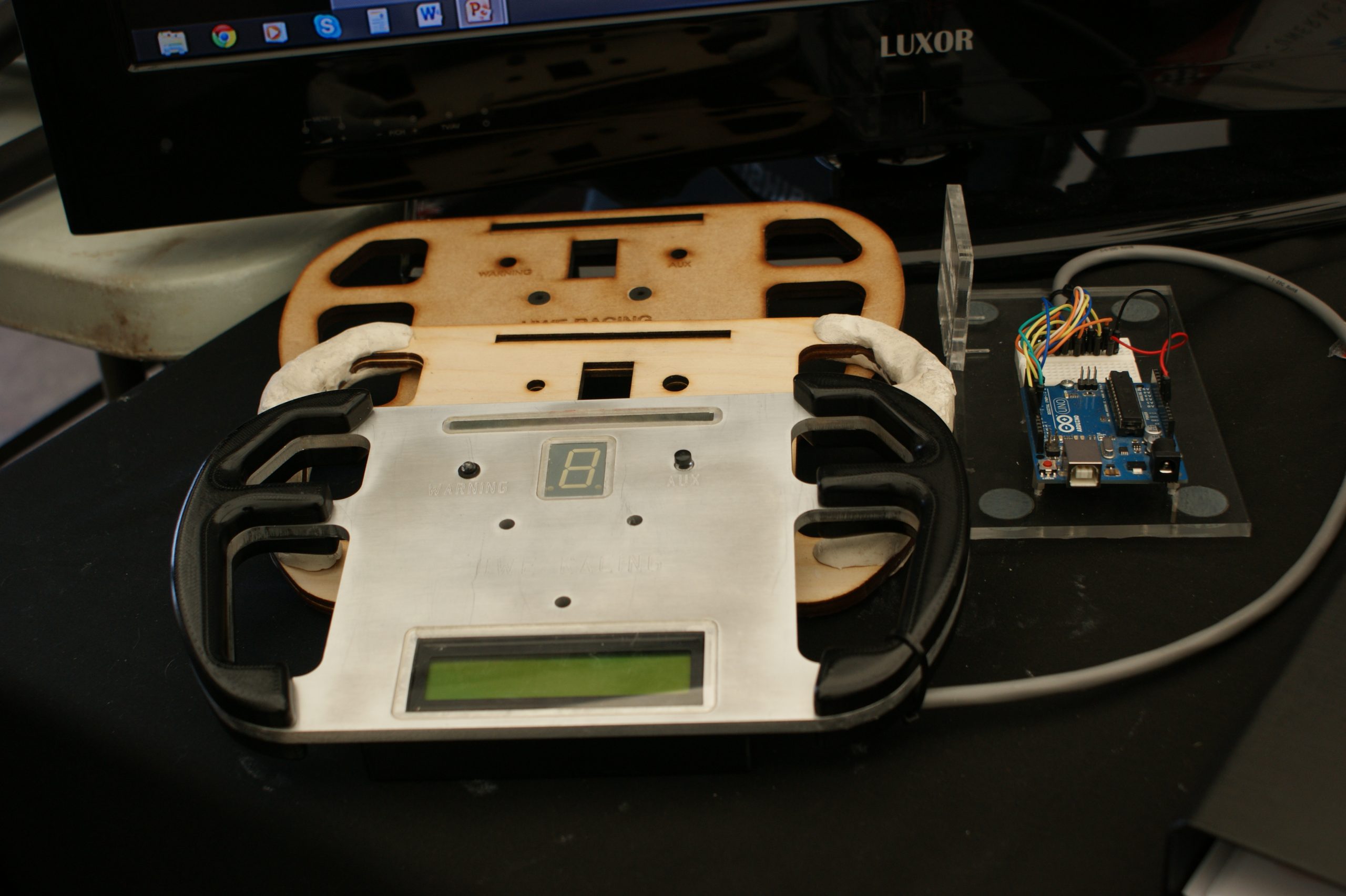
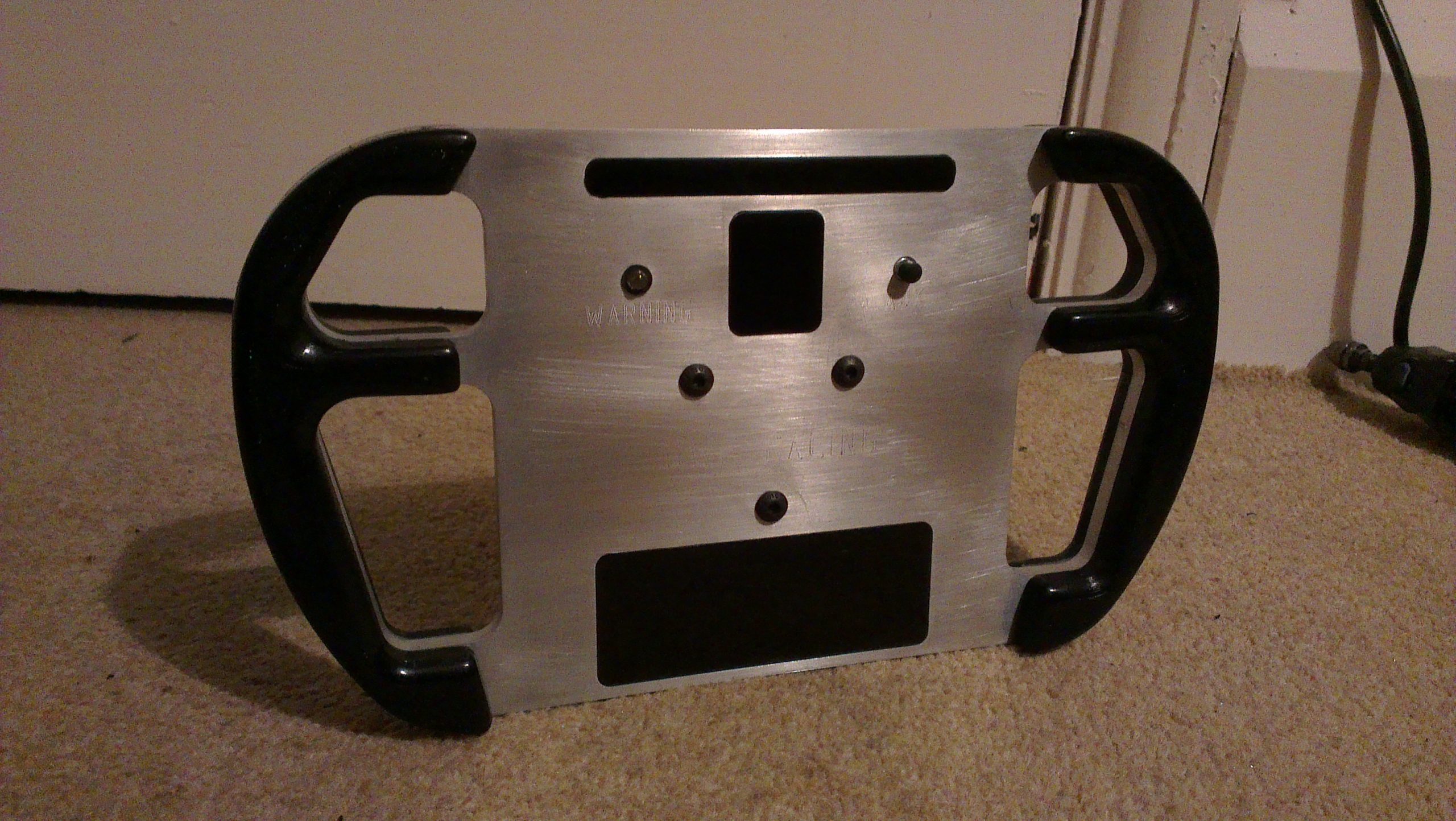
During some free time after the event, the steering wheel was cleaned up and vinyl tint was applied to the display covers. It will now act as a display model for future events. The model is popular as it can be picked up, handled and inspected closely quite unlike a CAD model.
The team this year will hopefully progress with the experience that was obtained by building this for the first time. There was many mistakes in both design and manufacture that can now be easily overcome with foresight and planning.

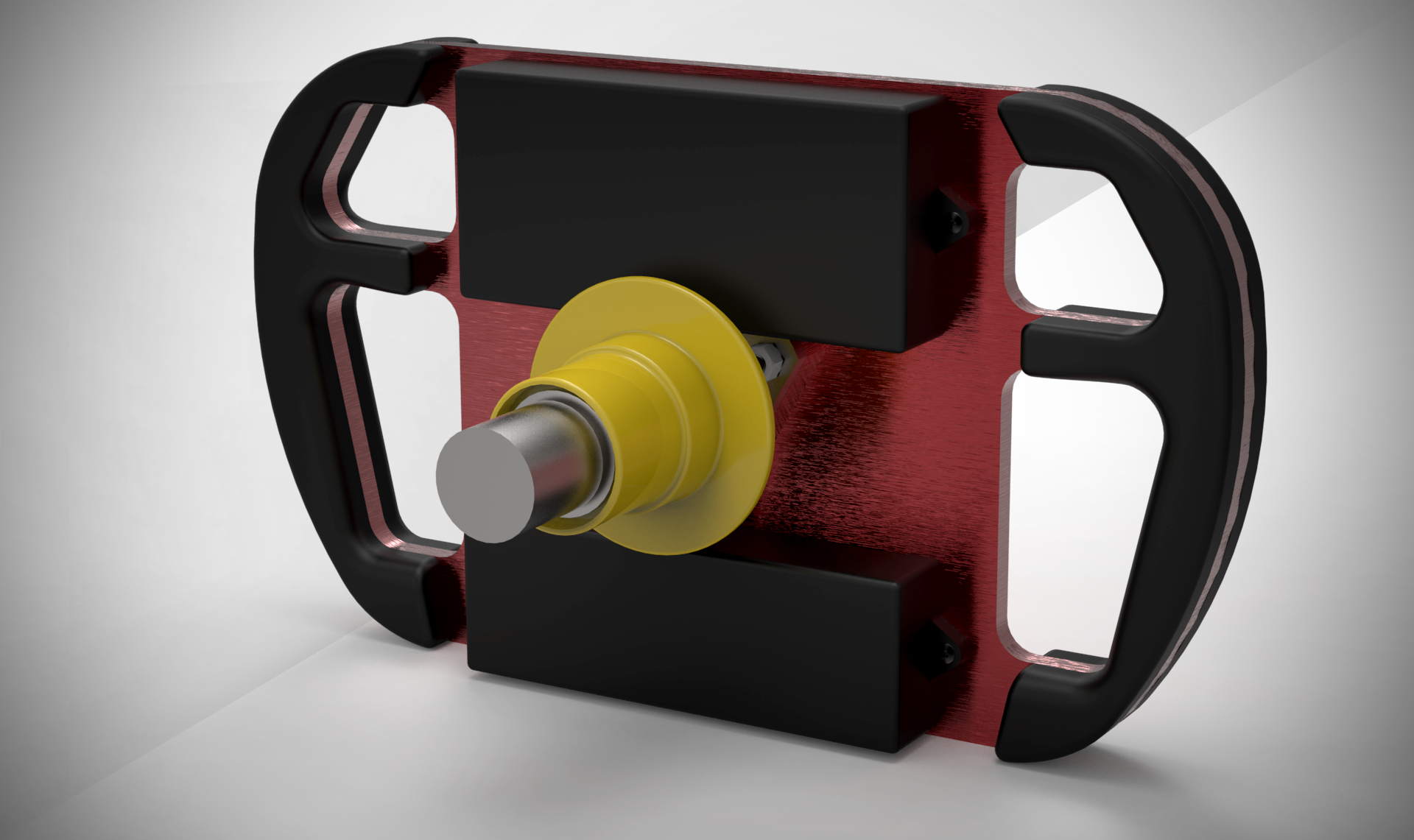
Keyshot was used to render views of how the steering wheel could of looked if it was complete and functional. The software allowed for easy selection of material properties and lighting conditions. The outcome is a professional and realistic render.

Finally, even though the event was last July, I have now finished blogging about the design and manufacture of the steering wheel project. I will still be involved with Formula Student for another year so expect more posts in the future.
Now for the next project…