The task of designing the PCB, to be mounted to the steering wheel assembly, proved to be tough. With only some experience from GCSE electronics, this part of the project was accompanied with a steep learning curve.
Through recommendation on a number of Arduino forums, the software of choice was Eagle v6 from CadSoft. This is a powerful tool with an extensive library of electronic components. The user interface wasn’t the most user friendly, instead relying on keyboard shortcuts. Although it was easy to learn by following a selection of YouTube tutorials by Jeremy Blum.
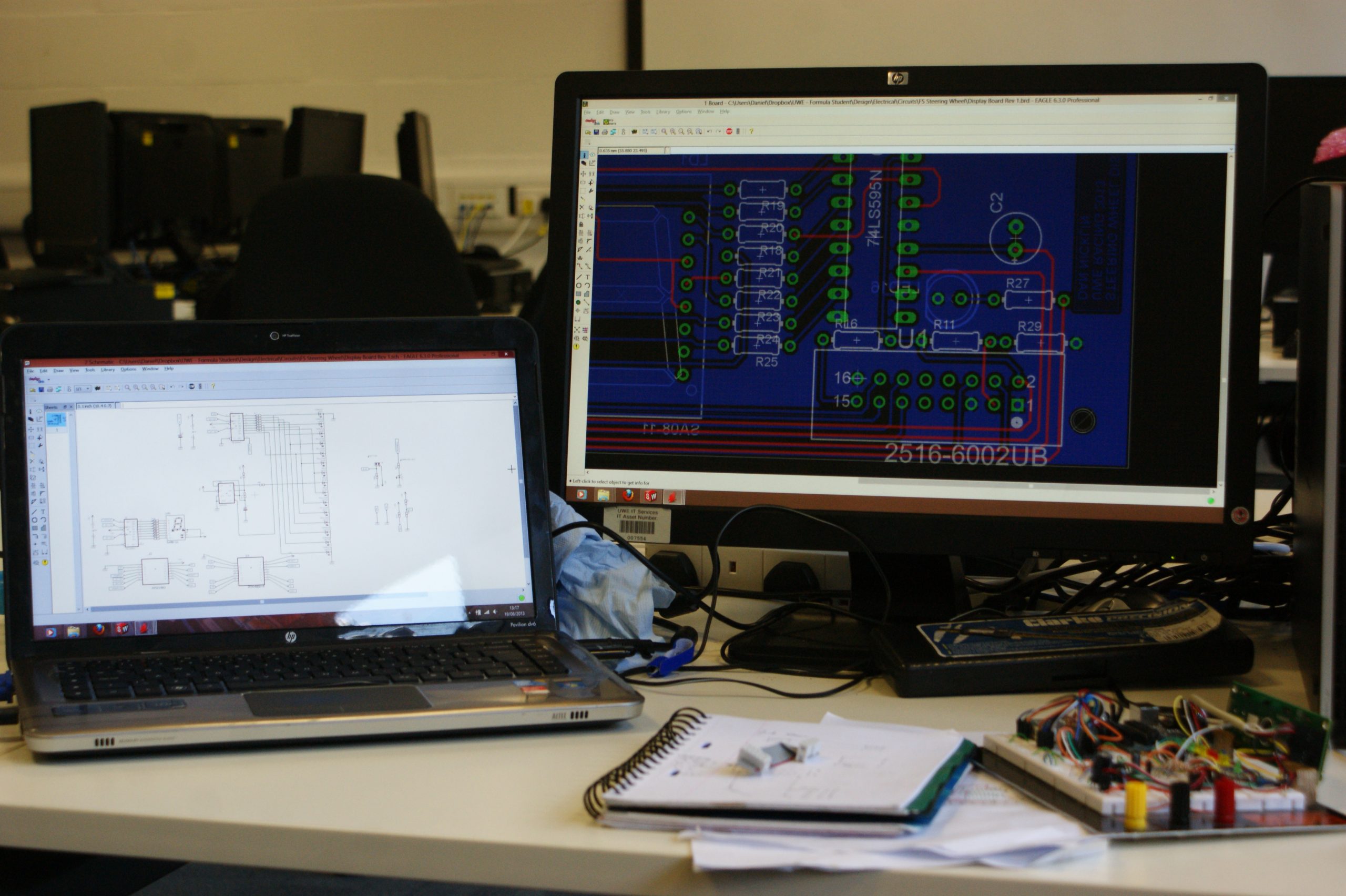
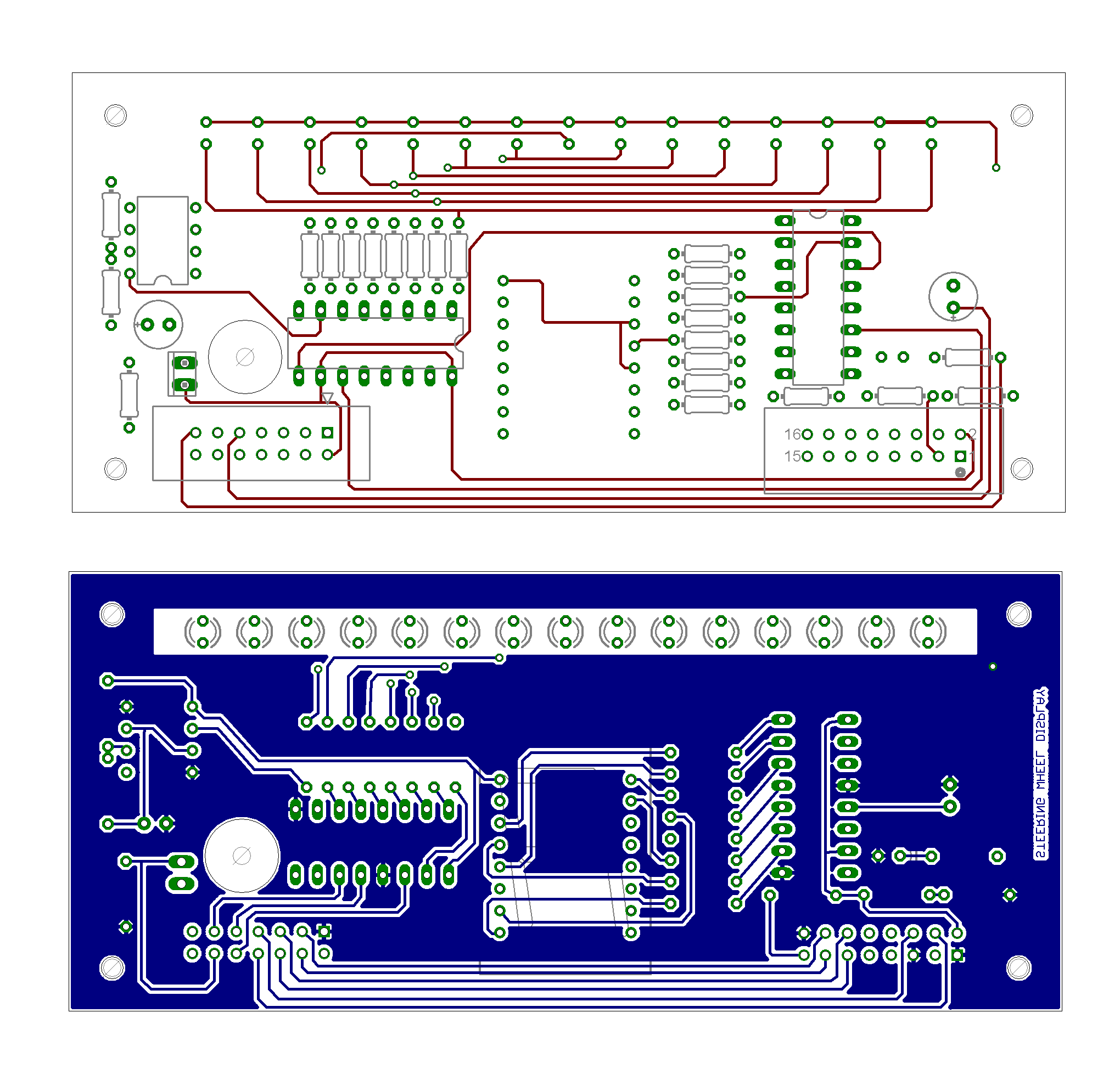
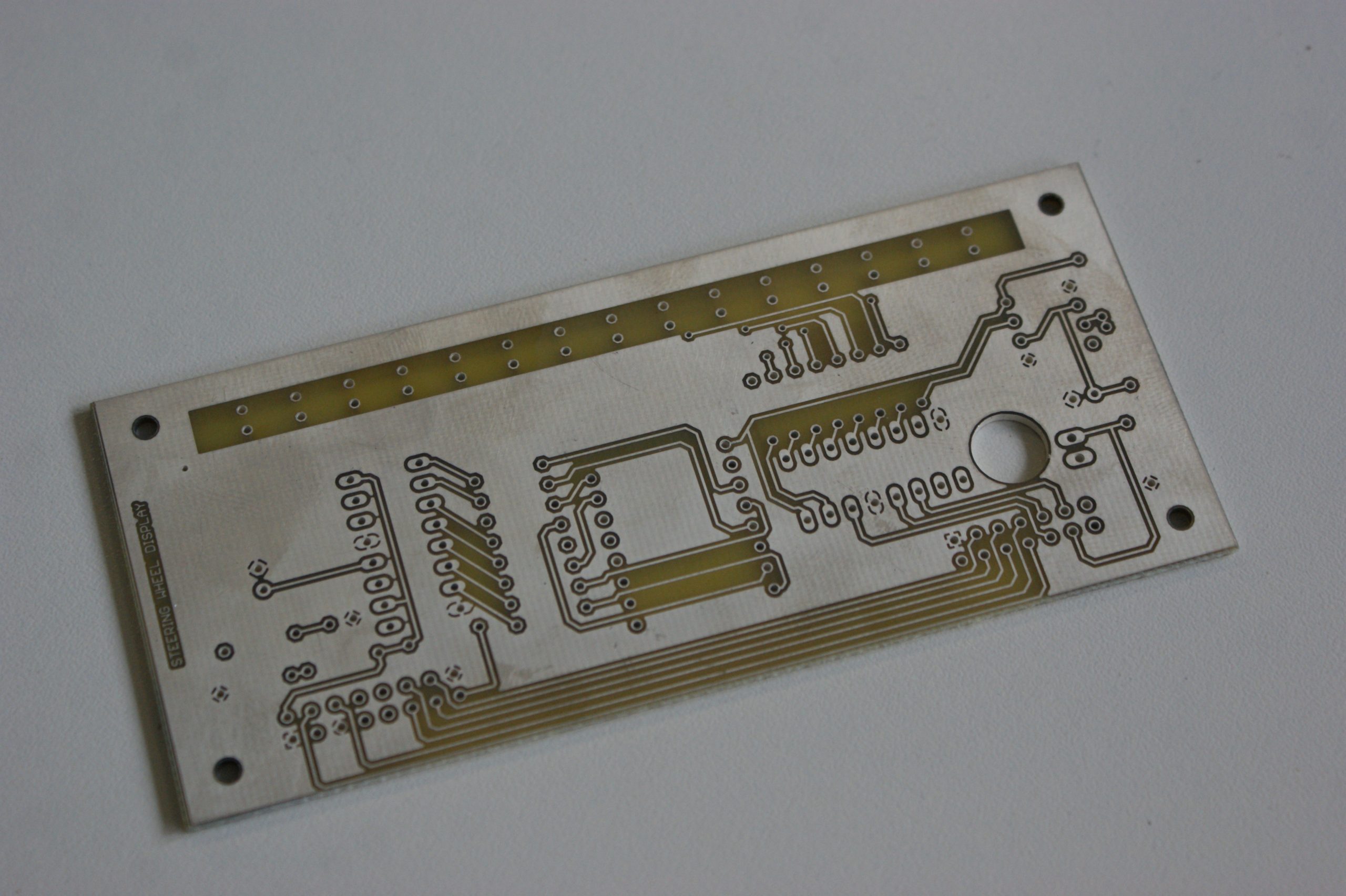
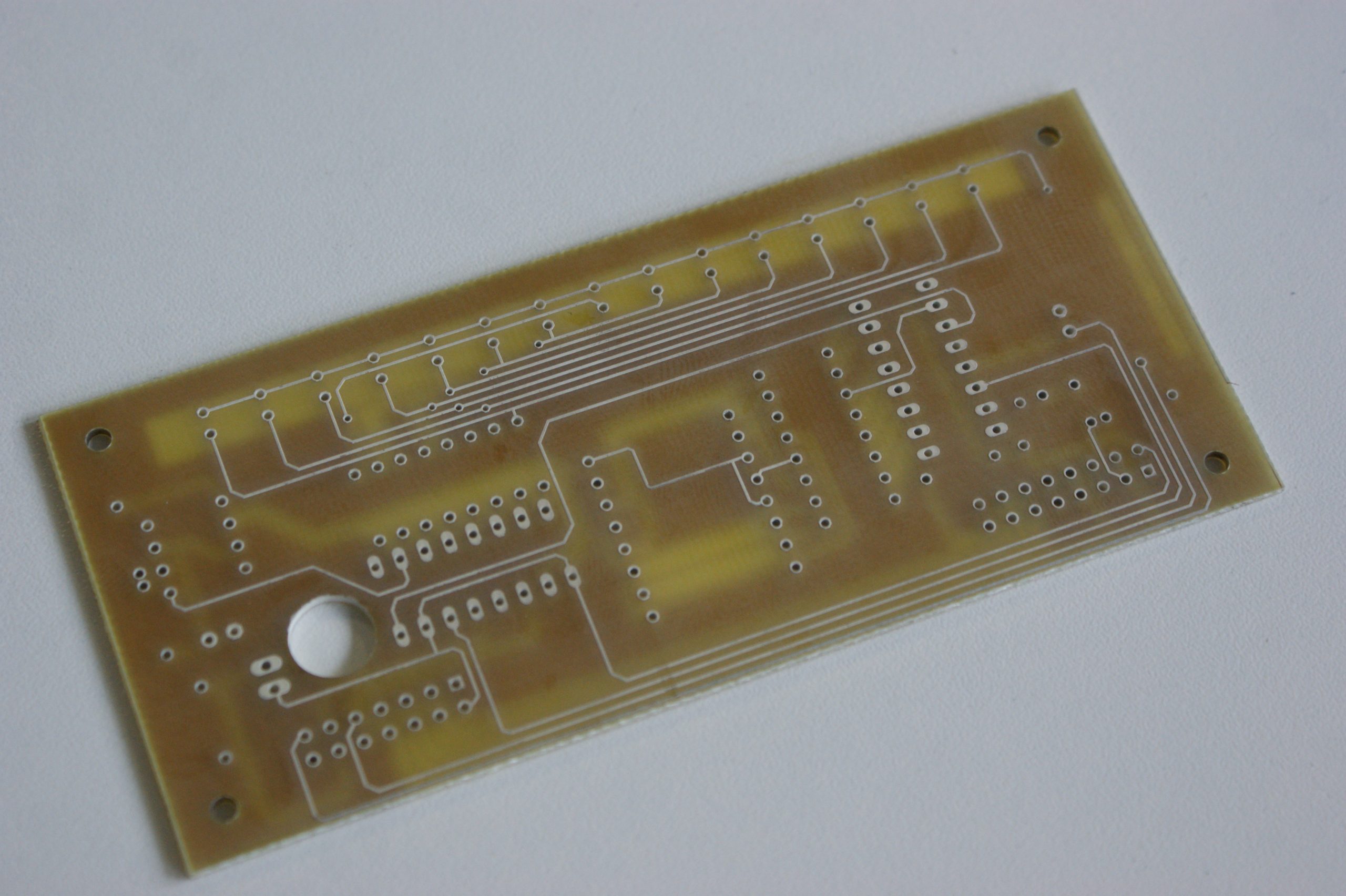
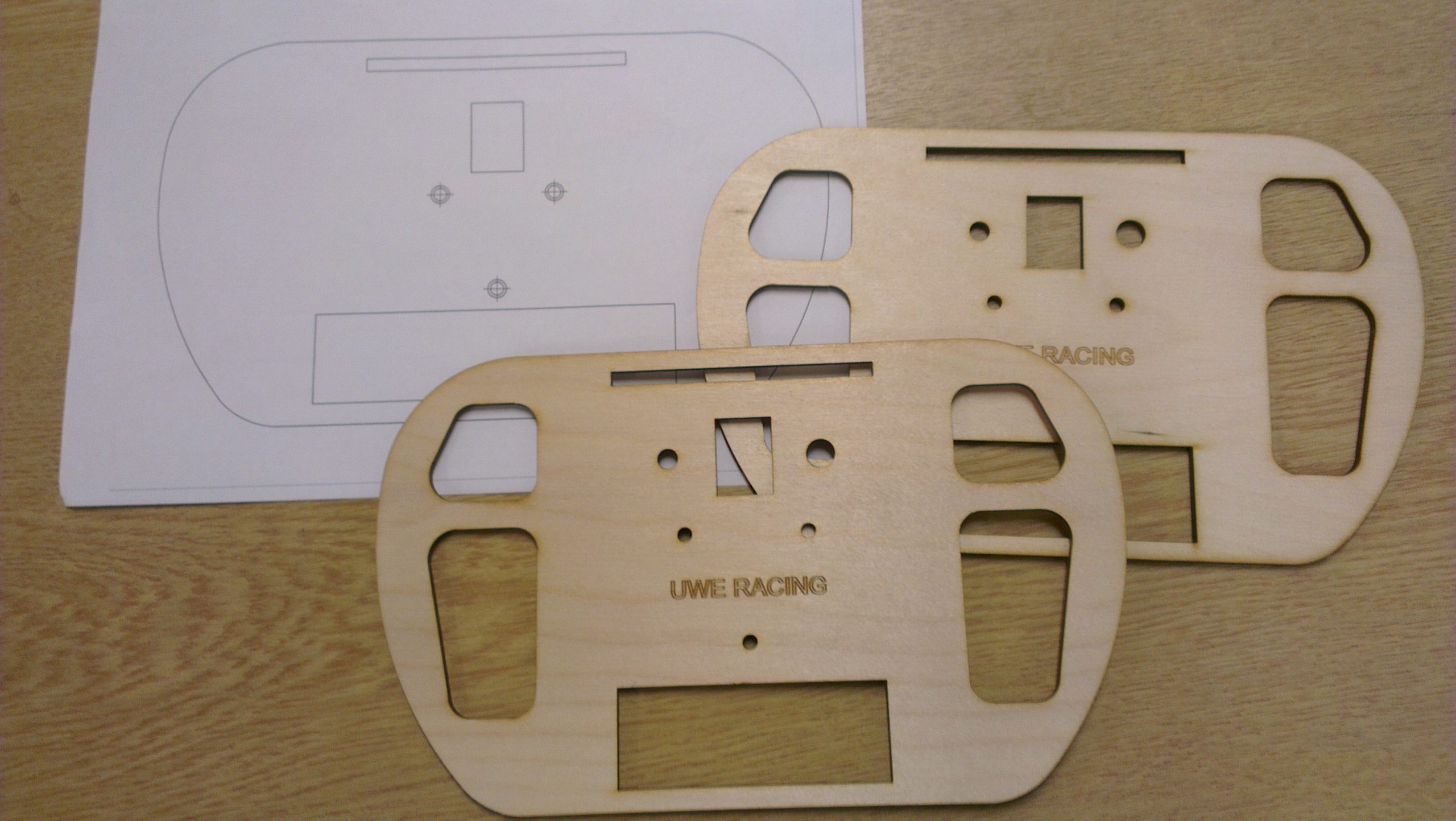
The size of the board (51mm x 110mm) was dictated by the space available between the top of the steering wheel and the steering boss, leaving adequate clearance for covers. Placement of the display components upon the board were already decided. This left only the other electrical components and tracks to be placed and routed.
The board was fabricated by Spirit Circuits and their free 48-hour prototyping service “Go Naked”. They provided us with a two sided aluminium coated board with just the essentials, tracks and holes. Their customer service was exceptional in helping to meet our needs. We promptly received a professional high quality board that only required cutting to size prior to use.
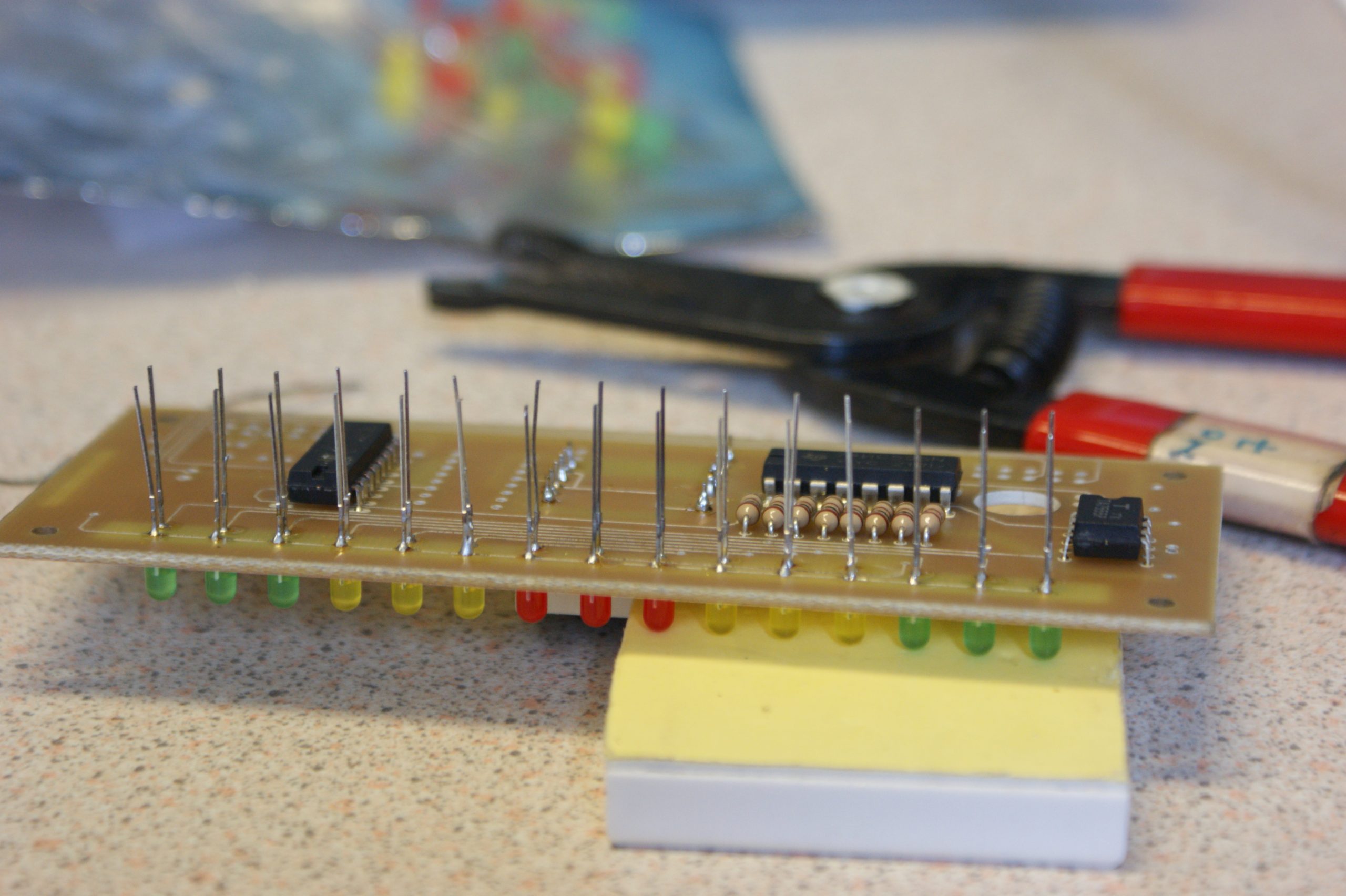
Initially the assembly and soldering of the electronic dash went to plan, with the majority of the components fitting without a problem. A couple of overlooks included; attachment of the switch and warning LED, placement of the ribbon cable and selection of connectors.
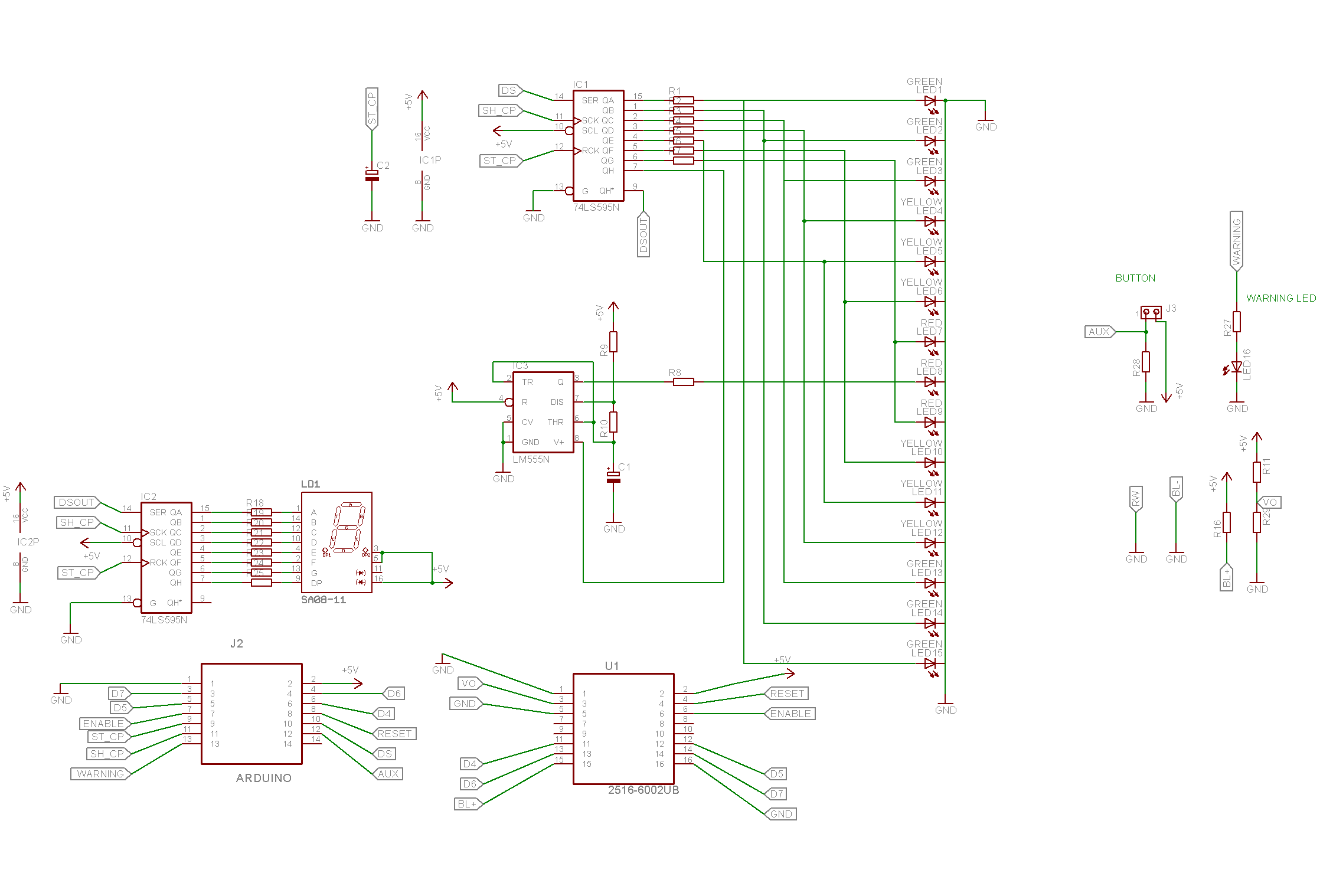
When linked to the Arduino and powered for the first time, all of the display lit up and ran through the start-up test routine a few times. But before too long, it was noticeable that the display was not functioning entirely correctly. The central RPM range LED failed to blink and the LCD display would occasionally flicker with random characters. This suggested that either a faulty component had been used or the board was shorting. After inspecting the soldering and replacing components, it was found that a grounding fault was the cause. Although it’s exact location was unknown.
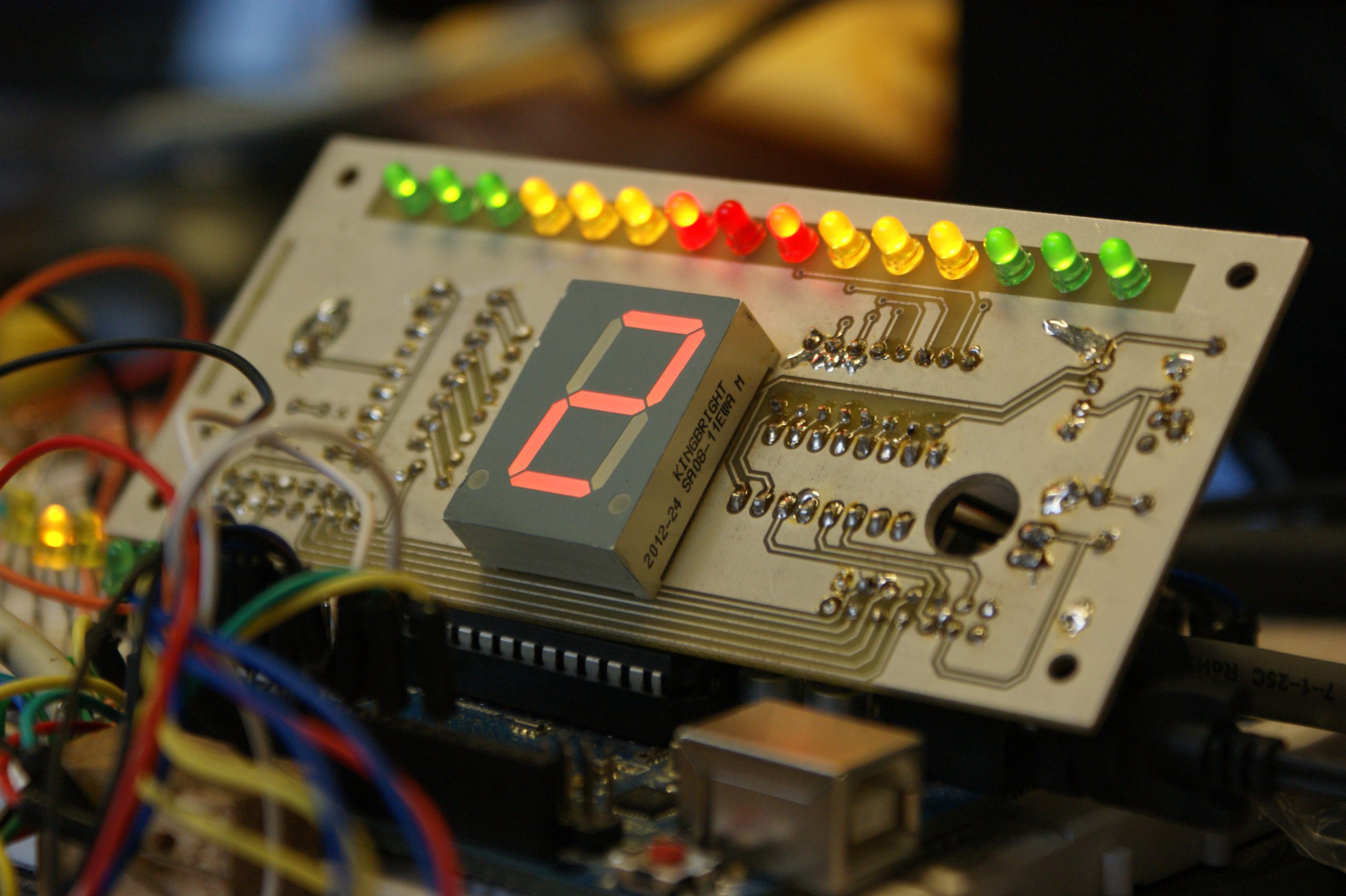

While it was disappointing that the display did not work correctly. It proved to be a great prototype and provided us with a number of improvements for the next revision. The main points being; bigger tracks, pads and clearances along with smaller components.
Next… Steering Wheel – Final Assembly




{kind=link}